像环境配置这样的问题虽然如果想非常快弄完,也不难(你甚至可以去Mircosoft Store里面下载一个Python环境),然而,这么做*后患无穷,尤其是等到要安装一些复杂的包的时候.因此,在这篇文章中,我将介绍conda的使用和Python中最常见的两个环境IPython和Jupyter Notebook的相关配置,以及使用VScode编辑器.
conda的使用
为什么要用conda
Package, dependency and environment management for any language—Python, R, Ruby, Lua, Scala, Java, JavaScript, C/ C++, FORTRAN
conda作为一个包管理器,可以保证你的电脑上同时存在多个不同的Python版本,并且每一个版本之间都相互独立,互不干扰(为何同时要有多个版本,因为许多包不是向下兼容的.简单的说,就是对于一个依赖,安装其最新的版本并不总是一个好的选择)
这是其优点的一方面,而另外一个方面则更为重要,在conda中,你可以打包,发布你的程序,这样可以非常方便的实现代码的共享(这可比直接拷贝源文件来得方便)
而我们这次使用的是conda的一个发行版(?有可能是别的名称)anaconda,并且以我个人电脑为例,讨论其安装与使用.
anaconda的安装
首先在官网上下载anaconda(这个时候要养成在官网下载的习惯,不要下一堆杂七杂八的东西)
然后安装anaconda,首先它会问你是给本用户安装还是给所有用户安装,我个人建议是前者(但实际上就我所知,99%家里的Windows电脑只有一个用户)
之后就会有这样一个提示框
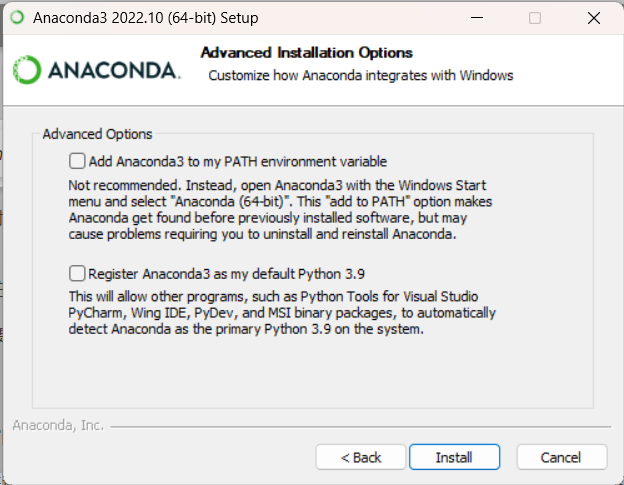
这里有两个选项,我刚好要和推荐配置唱一波反调:
- 第一个选项有关于环境变量,虽然上面并不建议添加到环境变量,但是如果不这么做,很多时候会非常麻烦
- 第二个选项是覆盖原有Python成为默认环境,我个人倾向于如果已经有Python环境了,就不要覆盖,免得影响现有依赖
然后就是点击Install等待其安装.
anaconda的使用
安装完anaconda之后,你可以打开你电脑上的Anaconda Powershell Prompt,然后可以看见一个命令行界面
不过与Powershell不同的是,在anaconda里面有一个(base),这意味着你目前处于一个基础环境.
然后如果你在其中输入IPython,那么就会有IPython的界面跳出来,表明其已经被安装了.
而Jupyter环境则可以通过输入jupyter notebook尝试,你们会得到这样的界面:
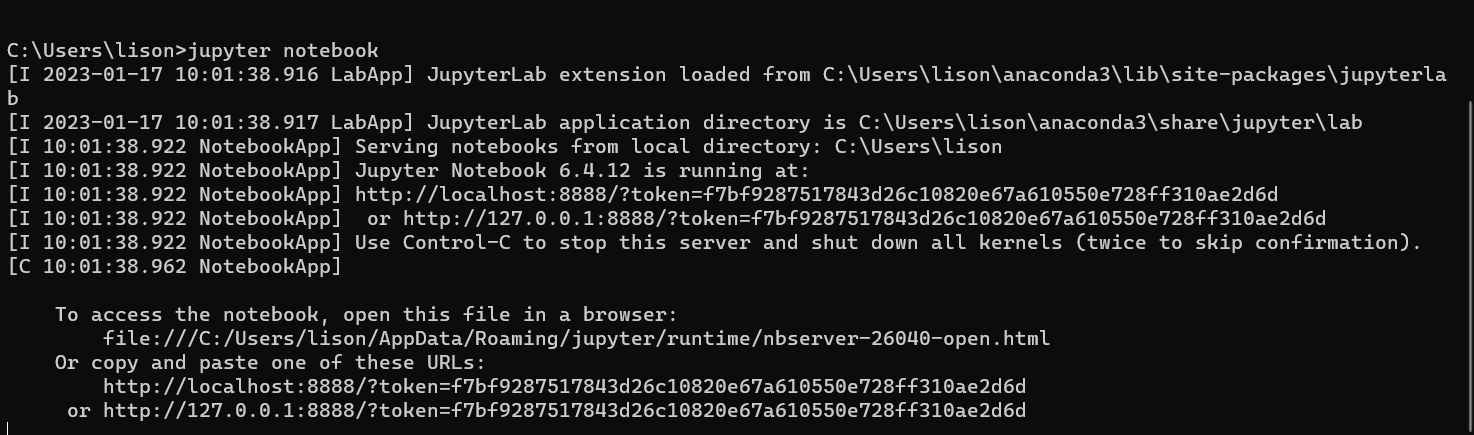
表明Jupyter内核已经启动,然后你需要使用浏览器去连接这个内核
怎么连接希望大家自己想想,毕竟大家都懂英文
但是实际上,我更加推荐使用VSCode作为Jupyter的编辑器,不过jupyter命令有别的功能,比如转换笔记本,大家可以去查找一下.
创建新环境
好,现在假设我需要创造一个环境用来给我做机器学习,那么我们可以用
conda create -n "machine-learning" python=3.8来创建,这里我配置了一个名字叫”machine-learning”的环境,使用的python版本为3.8
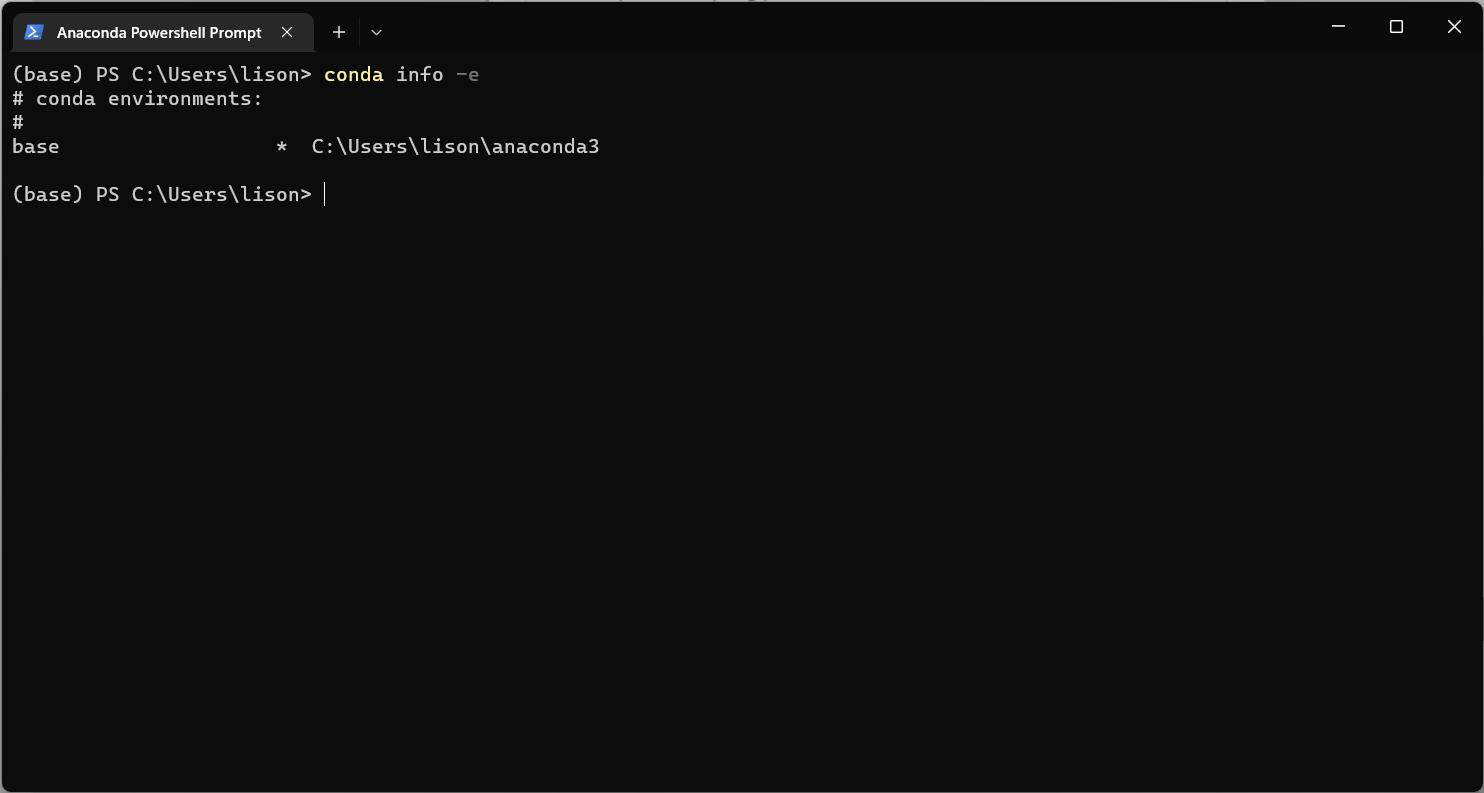
安装好之后,在anaconda里面输入conda info -e(展示所有的环境),就可以看到这样的结果

这表明新的环境已经被成功安装,然后输一下ipython试一试

淦,出错了,还是原来的python环境没变
经过分析,我发现这个是我电脑原本安装的python,由于我的conda环境里面并没有ipython,因此在寻找的时候按照先后顺序就找到了自己电脑的ipython
因此,在使用conda的时候,务必注意环境里面你打开的究竟是哪个内核.
安装包
比如说,我现在要安装sklearn库,那么我就在网上搜索sklearn anaconda,然后就搜到了安装指令conda install -c anaconda scikit-learn网址
把这输进去(注意检查当前的环境),然后安装即可
其会自动安装依赖,比如:
转移环境
假如你千辛万苦配好一个环境并且成功运行了一套程序,然后你需要移到别的电脑上运行(这台电脑可能是别的系统)
你可以采用conda env export > environment.yml来创建一个配置文件,然后把这个文件复制到另外一台电脑(可能是集群),然后conda env create -f environment.yml,就可以在不同的操作系统平台上复现环境
这种情况并不少见,你可能希望在自己电脑上(Windows或Mac)编程,然后到集群上(Linux)运行
可以参考一下这个网页
需要注意删除一些不必要的库以提升可移植性
源配置
由于一些众所周知的原因,大家需要使用国内镜像站,可以给一个网址
VSCode的安装与使用
VSCode作为一个常用编辑器,其安装并不复杂,这个大家自己网上搜就可以了.
VSCode的常用插件
- Better Comments
- Jupyter(注意,在使用前,需要安装好
Jupyter内核)
- Python(为python程序设计提供IDE环境)
最后想要提醒的
在每次打开程序的时候,务必要注意打开的python版本
比如: